Edge AI & Computer Vision Engineer
NVIDIA Jetson Nano ADAS & Edge Vision
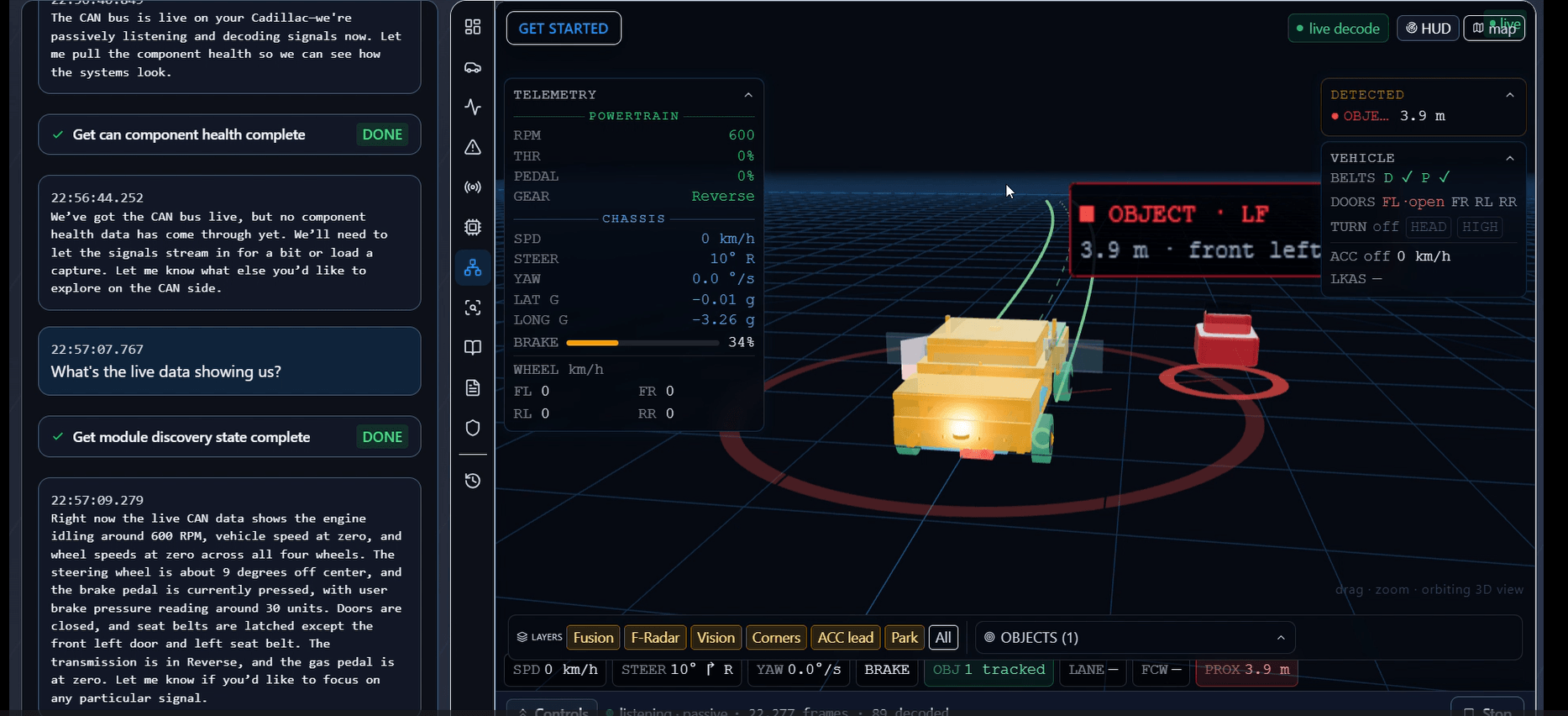
A custom edge-AI ADAS platform on NVIDIA Jetson Nano — multi-camera lane detection, object tracking, and roadway mapping with real-time inference on embedded hardware.
- NVIDIA Jetson Nano
- CUDA
- TensorFlow
- OpenCV
- Python
- Linux
- CNNs
Real-time
inference on-device
Multi-camera
front + rear perception
Overview
A custom ADAS platform built directly on NVIDIA Jetson Nano using TensorFlow, OpenCV, and CUDA. Forward and rear camera systems feed object detection, proximity monitoring, lane detection, lane tracking, and roadway mapping — with driver-assist, forward- and rear-alert modes.
Real-time image acquisition and inference pipelines were optimized for constrained embedded edge environments, and the computer-vision models were deployed and validated running directly on physical Jetson Nano hardware.